



Դրոշմման/շերտավորման ռոբոտ SDCX RMD-300/200/160/120/35/08/110/20/50
Տեխնիկական պարամետրեր
| Մոդելի համարը | Ազատության աստիճան | Վարորդական ռեժիմ | Օգտակար բեռ (կգ) | Կրկնակի դիրքավորման ճշգրտություն (մմ) | Շարժման միջակայք (°) | Առավելագույն արագություն (°/վ) | Դաստակի թույլատրելի բեռի իներցիա (կգ·մ)2) | Շրջանաձև զարկ (ցիկլ/ժամ) | Շարժման շառավիղը (մմ) | Տեղական քաշը (կգ) | ||||||
| J1 | J2 | J3 | J4 | J1 | J2 | J3 | J4 | |||||||||
| SDCX-RMD300 | 4 | AC սերվո շարժիչ | 300 | ±0.5 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | 85 | 90 | 100 | 190 | 134 | 1000③ | 3150 | 1500 |
| SDCX-RMD200 | 4 | AC սերվո շարժիչ | 200 | ±0.3 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | 105 | 107 | 114 | 242 | 78 | 1300③ | 3150 | 1500 |
| SDCX-RMD160 | 4 | AC սերվո շարժիչ | 160 | ±0.3 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | 123 | 123 | 128 | 300 | 78 | 1500③ | 3150 | 1500 |
| SDCX-RMD120 | 4 | AC սերվո շարժիչ | 120 | ±0.3 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | 128 | 126 | 135 | 300 | 78 | 1560թ.③ | 3150 | 1500 |
| SDCX-RMD50 | 4 | AC սերվո շարժիչ | 50 | ±0.2 | ±178 | ± +90~-40 | ± +65~-78 | ±360 | 171 | 171 | 171 | 222 | 4.5 | 1700թ.② | 2040 | 660 |
| SDCX-RMD20 | 4 | AC սերվո շարժիչ | 20 | ±0.08 | ±1170 | ± +115~-25 | ± +70~-90 | ±360 | 170 | 170 | 185 | 330 | 0.51 | 1780թ.① | 1720թ. | 256 |
| SDCX-RMD08 | 4 | AC սերվո շարժիչ | 8 | ±0.08 | ±170 | ± +90~-40 | ± +68~-90 | ±360 | 251 | 195 | 195 | 367.5 | 0.25 | 1800թ.① | 1433թ. | 180 |
Նշումներ՝
① Փորձարկման ուղին 150 մմ բարձրություն և 1000 մմ լայնություն ունի, և իրական ցիկլի տևողությունը կախված է իրական աշխատանքային պայմաններից։
② Փորձարկման ուղին 200 մմ բարձրություն և 1000 մմ լայնություն ունի, և իրական ցիկլի տևողությունը կախված է իրական աշխատանքային պայմաններից։
③ Փորձարկման ուղին 400 մմ բարձրություն և 2000 մմ լայնություն ունի, և իրական ցիկլի տևողությունը կախված է իրական աշխատանքային պայմաններից։
Խուսափեք դյուրավառ, պայթուցիկ և քայքայիչ գազերի և հեղուկների հետ շփումից։ Խուսափեք ջրի, յուղի և փոշու ցայտքից։ Պահեք էլեկտրական աղմուկի աղբյուրներից (պլազմա) հեռու։
Շարժման միջակայք
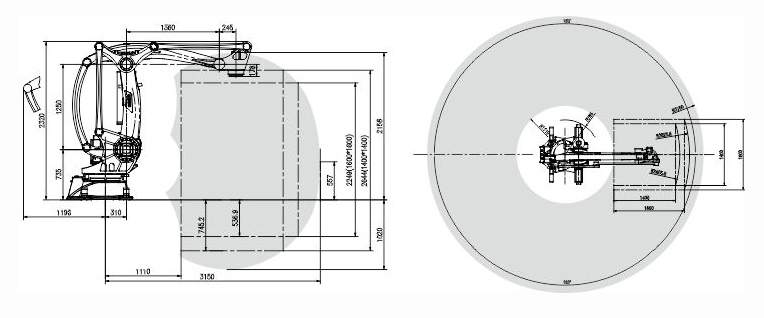
SDCX-RMD300/200/160/120-ի շարժման միջակայքի գրաֆիկ
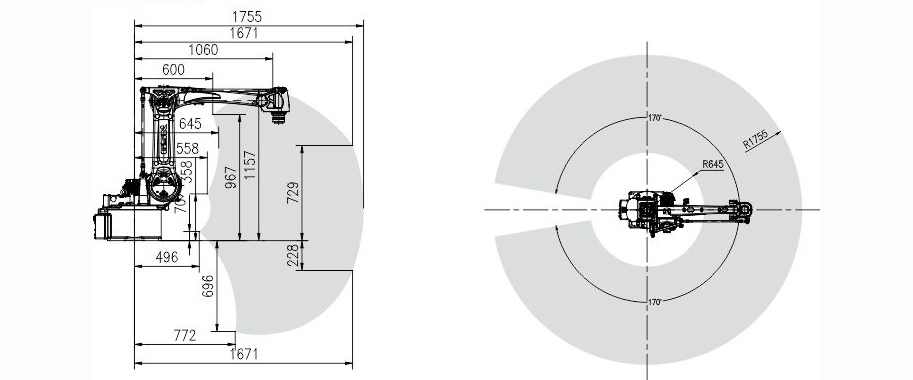
SDCX-RMD20-ի շարժման միջակայքի գրաֆիկ
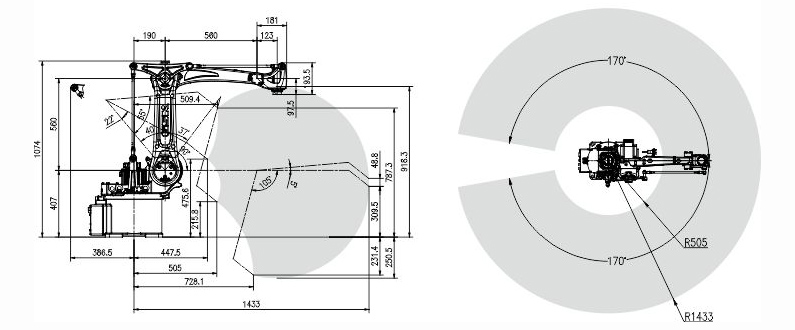
SDCX-RMD08-ի շարժման միջակայքի գրաֆիկը
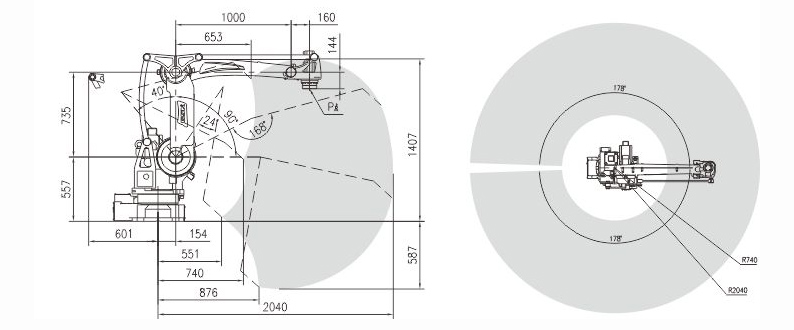
SDCX-RMD50-ի շարժման միջակայքի գրաֆիկ
Արտադրանքի կիրառման ցուցադրում
Լուծումներ
Պողպատե կծիկների մշակման նախագծի տեխնիկական սխեման












